-
-
[翻译]【ROZZ】ROS程序模糊测试框架,论文学习
-
发表于: 2025-3-27 02:04 1406
-

ICRA 2022
题目:
ROZZ: Property-based Fuzzing for Robotic Programs in ROS
仓库:未开源

ROS
ROS程序的测试需求:
- ROS在机器人软件开发中广泛应用,但其程序复杂且需处理多种异常,开发可靠安全的ROS程序面临挑战。
- ROS程序控制机器人与物理世界和人类交互,安全漏洞可能被攻击者利用,导致危险后果。
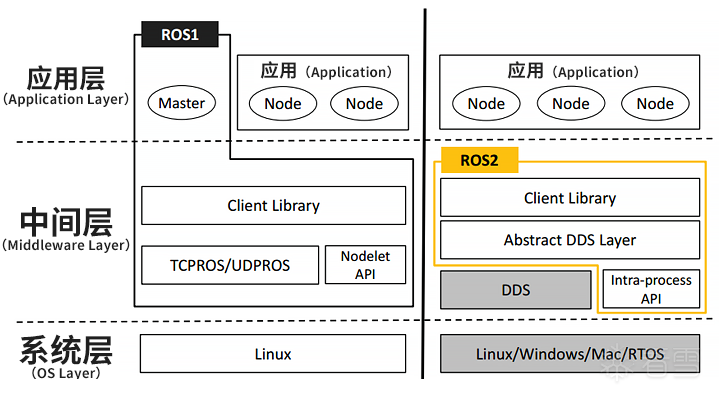
ROS架构:
从ROS1到ROS2,ROS实现了去中心化的架构设计。
ROZZ
1.模糊测试在ROS程序中的挑战
在ROS中实施模糊测试,会面临以下三种挑战:
- ROS程序接收多维输入,如用户数据、配置参数和传感器消息。
但是现有的模糊测试方法只从一个维度生成测试用例,即用户输入。 - 每个ROS程序作为一个ROS节点运行,与其他ROS节点通信以协作执行机器人任务。因此,测试单独的ROS节点通常是没有意义的。
- 每个ROS节点发送的消息是顺序的,这种消息序列会由于网络中断或USB断开导致的通信不稳定而乱序。现有方法不能测试处理时序的代码。
2.ROZZ关键技术
针对上述的三种挑战,论文分别提出对应的三种技术来解决。
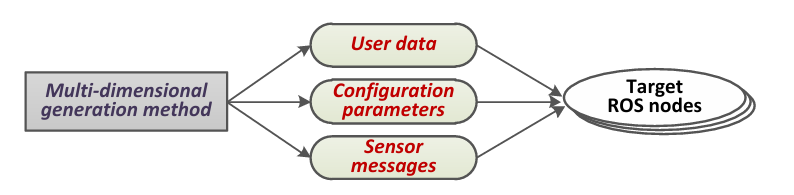
2.1多维测试用例生成方法
ROZZ从三个维度生成测试用例,作为输入同时作用于目标ROS节点。
- 用户数据:来自GUI,命令行,ROS服务。
- 配置参数:从特定的配置文件中读取,对机器人进行配置,如最大移动速度和最小旋转角度。
- 传感器信息:从各种传感器,如激光雷达生成的消息。
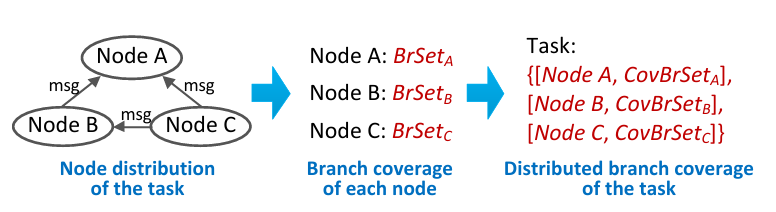
2.2分布式分支覆盖统计
针对ROS程序的分布式节点模型,ROZZ提出了一种分布式分支覆盖方法,用于描述多个ROS节点在机器人任务中的整体代码覆盖率。
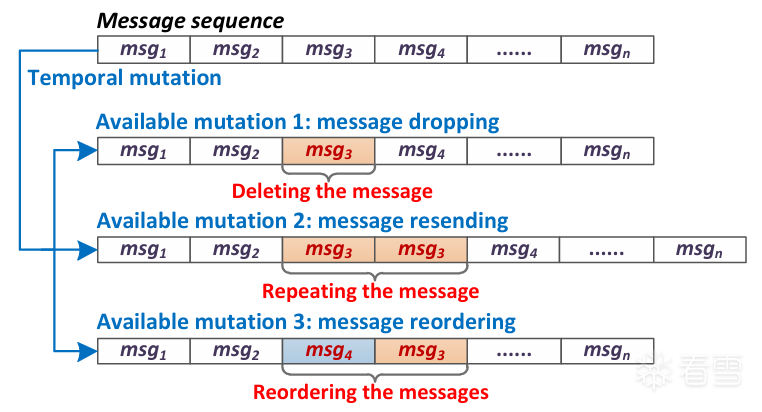
2.3时序变异策略
针对ROS程序输入的时序特性,ROZZ设计了一种时序变异策略,通过改变传感器消息序列的顺序来生成具有时序信息的测试用例。
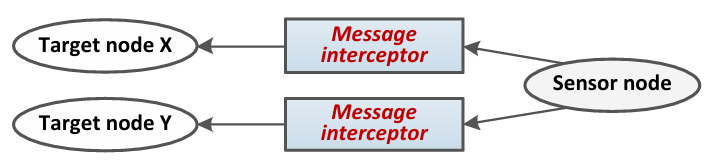
时序变异策略提供了三种可用的时间变异模式,以模拟通信不稳定的情况:
- 消息丢弃
- 消息重发
- 消息重排序
3.ROZZ设计与实现
使用Clang9.0,对被测的ROS程序的LLVM字节码进行代码插桩和动态分析,其架构包括代码分析器、信息分析器、节点监控器和漏洞检查器。
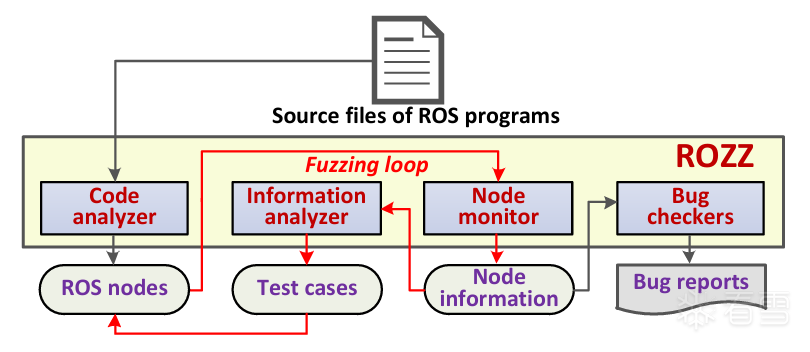
ROZZ的工作流程:
- ROZZ通过代码分析器对ROS程序进行代码插桩,生成可执行的ROS节点。
- 节点监控器执行插桩代码,收集每个ROS节点覆盖的代码分支,并计算分布式分支覆盖。
- 信息分析器检查分布式分支覆盖,识别有趣的种子测试用例。
- 漏洞检查器分析收集到的运行时信息以检测漏洞并生成漏洞报告。
4.ROZZ评估与结果
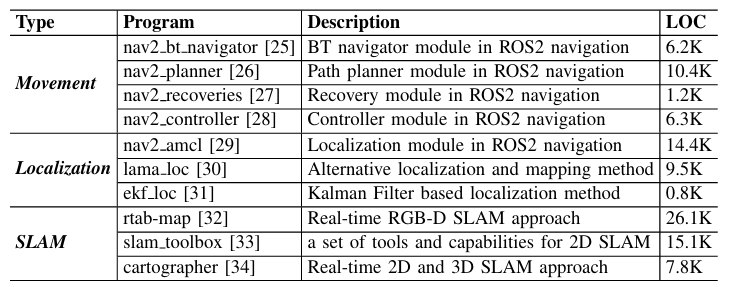
测试对象:
10个ROS2机器人程序,涵盖导航(如nav2_planner、nav2_controller)、定位(如nav2_amcl)和SLAM(如slam_toolbox、rtab-map)等核心功能模块。
虚拟环境:
使用Gazebo 11.5仿真平台,模拟机器人TurtleBot3 Waffle,配备激光雷达、里程计、IMU和2D摄像头等传感器,以复现真实场景。
漏洞类型:
内存漏洞,空指针解引用(6)、释放后使用(5)、缓冲区溢出(3)、无效指针访问(11)。
逻辑漏洞,未捕获异常(18),由被测程序、第三方库、api调用引发。
漏洞分析:
并发问题,5个UAF漏洞由数据竞争引发(如线程A释放内存后,线程B仍尝试访问)。
未验证输入,11个漏洞发生在程序初始化阶段,例如未校验用户输入的无效参数。
第三方依赖,7个漏洞源自ROS核心组件(如rclcpp)或库(如OpenCV)。

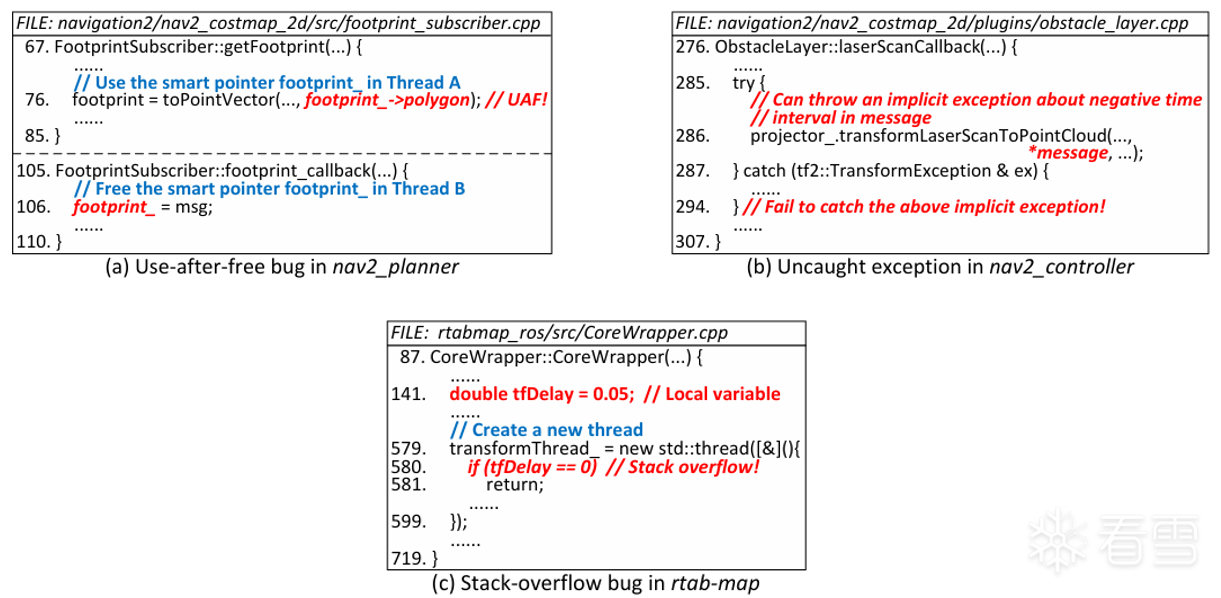
漏洞样例:
UAF(a)发生在并发处理中,未捕获异常(b)逻辑未对隐式异常进行处理,栈越界(c)同样发生在并发处理中。
总结
优势:
在覆盖分支统计上,ROZZ明显优于ROS2-fuzz和ASTAA-like。在ROS场景,ROZZ提出的多维生成方法、分布式分支覆盖和时序变异策略具有相当大的优势。
局限性:
ROZZ目前只能测试C/C++程序,且在覆盖特殊执行情况(如异常处理和线程交织)方面存在限制。
ROZZ目前只能检测内存漏洞,无法检测语义漏洞,比如异常的机器人行为。
赞赏
|
|
|---|---|
|
|
|

